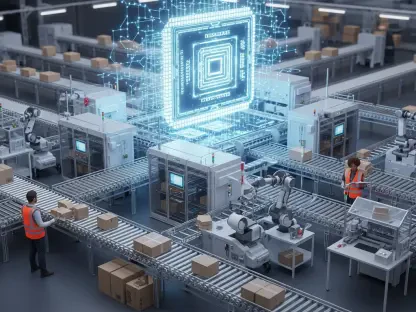
The global logistics industry has reached a turning point where sophisticated digital intelligence must finally master the tactile unpredictability of the physical world or risk remaining confined to the realm of pure data. While software algorithms have successfully optimized delivery routes and inventory levels with remarkable precision, the actual movement of goods inside a fulfillment center remains a domain where human dexterity frequently outpaces mechanical alternatives. This challenge is driving a significant shift in the logistics sector, moving away from traditional data processing toward the integration of Physical AI.
Bridging the automation gap in unpredictable warehouse environments requires a departure from rigid, pre-programmed movements. Physical AI represents the ability of a robotic system to perceive its surroundings and adapt its physical actions in real-time to meet complex demands. This intelligence is essential for addressing the concept of the “unpickable” item, which refers to objects with irregular shapes or fragile packaging that standard robots cannot handle. Successfully managing these items is considered the final frontier for robotic efficiency in modern supply chains.
Transitioning from Digital Intelligence to Physical Action
The transition from digital to physical action involves more than just adding a camera to a robotic arm; it requires a fundamental change in how machines process sensory information. Traditional AI has largely focused on processing vast amounts of data to predict consumer behavior or stock levels, but Physical AI applies this intelligence to the nuances of touch and spatial awareness. This allows robots to function in the “messy reality” of a warehouse, where items are rarely aligned perfectly or packaged identically.
As the demand for faster fulfillment increases, the significance of solving these tactile challenges becomes more apparent to major retailers. Robotic systems must now navigate a landscape filled with variety, from soft apparel to rigid electronics, all while maintaining the speed of a manual picker. The ability to handle these diverse tasks marks a shift from robots being seen as rigid tools to being viewed as adaptable partners capable of bridging the final gaps in the automation chain.
The Evolution of Robotic Picking and the Problem of Pilot Purgatory
Warehouse automation has a long history of ambitious prototypes that perform well in controlled demonstrations but struggle to survive the rigors of real-world logistics. Many robotic systems fall into a state known as “pilot purgatory,” where they are perpetually tested in small-scale trials without ever being deployed across an entire network. This occurs primarily because the systems fail to provide a consistent return on investment or require too much human intervention to remain profitable during high-volume periods.
Specialized robotics firms like Nomagic have focused their efforts on solving these specific, high-friction logistics challenges that have derailed previous automation attempts. By centering their mission on reliability and the handling of complex inventory, they seek to move the industry past the era of technological novelties. These firms recognize that for a robot to be truly useful, it must be able to resolve errors independently and maintain high performance without constant supervision from human technicians.
Breakthroughs in Handling Complex Fashion Inventory
The Shoebox Picker’s Hardware and Software Synergy
Mastering the picking of shoeboxes is a deceptively difficult task because of the extreme variability in box sizes, weights, and lid stability. Proprietary grippers combined with real-time AI perception allow specialized robots to analyze the specific orientation of every item before attempting a pick. This synergy ensures that the robot applies the correct amount of force and adopts the ideal grip to prevent damage to the inventory or the packaging itself.
The software component of this system utilizes advanced computer vision to identify potential risks, such as an unsealed lid or a box that is wedged between other items. By making split-second adjustments, the robot can successfully complete tasks that would normally cause a standard automated system to halt. This level of adaptability is what allows Physical AI to move beyond the limitations of older, more rigid robotic solutions.
Precision Engineering for High-Risk Manual Tasks
Loose lids in high-speed warehouse environments represent a significant risk, as they can easily lead to spills that halt entire sorting lines. Precision engineering has addressed this problem through controlled pressure techniques and edge-gripping movements that keep the lid securely attached to the box during transport. This approach mimics the careful handling of a human worker, ensuring that even the most fragile or unsealed items are moved safely across the facility.
By focusing on these specific high-risk tasks, specialized robots eliminate one of the most common reasons for manual intervention in the picking process. The development of specialized end-of-arm tools allows the machines to interact with the physical world in a way that is both firm and delicate. This capability is crucial for fashion e-commerce, where packaging is often designed for aesthetic appeal rather than for ease of robotic handling.
Industrial Performance and Throughput Metrics
The success of these systems is best measured by their performance in active industrial settings, where throughput and coverage are the most critical metrics. Current Physical AI systems can handle over 98% of SKU variations in specific categories, ensuring that almost no manual sorting is required for that inventory segment. This high level of coverage is essential for facilities that process thousands of different items every hour.
In terms of speed, these robots are capable of processing between 450 and 600 units per hour, depending on the configuration of the items in the bins. This performance matches or exceeds the average pace of human workers over a full shift, especially when considering the robot’s ability to work without breaks. Such data provides the concrete evidence needed for warehouse operators to justify the large-scale integration of robotic picking into their existing workflows.
What Sets Specialized Physical AI Apart from Generalist Robotics
The current landscape of robotics is often split between the hype surrounding “humanoid generalist” machines and the pragmatic success of purpose-built tools. While generalist robots are designed to perform a wide variety of tasks, they often struggle to achieve the high throughput and reliability required in a specialized industrial setting. Purpose-built Physical AI, on the other hand, excels by mastering a specific, difficult domain through dedicated hardware and software optimizations.
A key differentiator for specialized systems is the strategic use of Visual Language Action models to handle exceptions rather than the entire picking process. By using these advanced models to interpret visual data during unusual events, the robot can solve problems like entangled items or obscured labels without slowing down the primary operation. This focus on “high-friction” tasks through specialized engineering allows these robots to deliver immediate value in a way that generalist systems often cannot.
Current State of Deployment and the Service-Oriented Model
The business side of robotics has evolved alongside the technology, moving toward a Robot-as-a-Service (RaaS) subscription model. This approach allows warehouse operators to pay for robotic capacity as an operational expense rather than a massive upfront capital investment. By shifting the operational risk to the technology provider, the RaaS model ensures that the robots must remain reliable and productive for the provider to remain profitable.
Major e-commerce players like Zalando have already begun scaling these systems, proving that the technology is ready for high-volume production environments. These deployments are typically governed by strict Service Level Agreements that guarantee specific performance outcomes and uptime percentages. This service-oriented approach has been instrumental in helping companies overcome the financial and operational barriers that previously hindered the adoption of advanced picking technology.
Reflection and Broader Impacts
Reflection
The journey toward solving the “unpickable” problem demonstrated that specialized Physical AI succeeded where generalist approaches faltered by prioritizing reliability over universal capability. While matching human speed in every single scenario remained a complex hurdle, the zero-churn reliability and consistent performance of these machines offered a stable alternative to the high turnover of manual labor. The focus on edge cases proved that true automation value was found in the ability to handle the unexpected without human assistance.
Broader Impact
This shift in fulfillment strategy influenced the global supply chain by reducing the reliance on seasonal labor and shifting the focus toward a more technically skilled workforce. As the “unpickable” problem was solved, it allowed companies to rethink the design of their fulfillment centers, moving away from human-centric layouts toward more densely packed, automated environments. These changes helped stabilize operating costs and allowed for more predictable delivery windows in the highly competitive e-commerce landscape.
The Future of the Autonomous Fulfillment Center
The transition of warehouse robotics from experimental novelties to essential industrial tools was completed through a commitment to solving the messy reality of the warehouse floor. Success in this field was not achieved through broad software updates alone but through the meticulous combination of AI perception and specialized mechanical engineering. These advancements ensured that robots were no longer limited by the variety of items they could touch but were instead defined by their capacity for autonomous problem-solving.
As specialized automation continues to redefine efficiency, the next logical steps involve the integration of these picking systems into fully autonomous logistics networks. This evolution will likely focus on deeper synchronization between robotic arms, autonomous mobile robots, and intelligent sorting systems to create a seamless flow of goods. Future fulfillment centers will prioritize systems that offer long-term industrial reliability, ensuring that the global e-commerce landscape remains resilient in the face of shifting consumer demands.