
The relentless pursuit of instantaneous logistical fulfillment has transformed modern warehouses into high-stakes laboratories where robotic prototypes like Blue Jay redefine the boundaries of automated sorting and package handling. This multi-armed design emerged to eliminate bottlenecks within an automated ecosystem, specifically targeting same-day delivery efficiency. By centralizing package movement into a single workspace, the technology sought to replace disconnected machines with a fluid, cohesive system.
Understanding the Blue Jay Robotics Initiative
Blue Jay represents a departure from single-purpose automation by introducing a multi-armed architecture designed to mimic collaborative human effort. This initiative aimed to prove that robots could manage the entire lifecycle of a package within a single cell. Its relevance lies in solving the “last-mile” sorting problem, where speed and precision are paramount for high-speed logistics.
Core Technical Features and Systems Architecture
Integrated Multi-Station Workspace
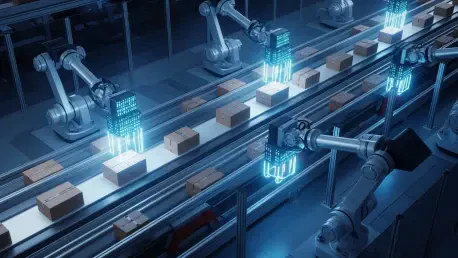
The primary innovation lay in consolidating three independent robotic stations into one unified workspace. This integration reduced the physical footprint while eliminating the handoff latency that typically occurs between separate machines. By streamlining these movements, the system achieved a level of fluid dynamics that boosted throughput in dense environments.
AI-Driven Rapid Development Cycle
Advanced artificial intelligence shortened the development timeline of Blue Jay to roughly one year. Sorting algorithms were trained in simulated environments to recognize varied packaging shapes instantly. This rapid iteration allowed engineers to refine manipulation techniques in real-time, ensuring the hardware could handle unpredictable surges in volume.
Innovations in Robotic Manipulation and Sensing
The shift toward robots that can “feel” marks a pivotal moment in automation. Blue Jay helped pioneer tactile sensing, allowing the system to identify the structural integrity of an object before applying pressure. Such developments are essential for moving beyond simple suction toward sophisticated manipulation that protects fragile goods.
Real-World Pilot Programs and Deployment
During its deployment at a South Carolina facility, the system functioned as a critical link in the same-day delivery pipeline. It successfully navigated the complexities of high-speed logistics by sorting items with a level of autonomy that reduced human intervention. These trials provided vital data on how multi-armed units could interact with existing conveyor infrastructure under operational stress.
Implementation Hurdles and Technical Limitations
Despite its prowess, the standalone unit faced barriers related to high manufacturing costs and mechanical intricacies. The complexity of maintaining multiple coordinated arms proved difficult to scale globally. Consequently, developers decided to discontinue the unit as a standalone product, pivoting its intellectual property into more cost-effective platforms.
The Future of Automated Fulfillment and Vulcan Systems
The transition toward the Vulcan two-armed system signals a move toward modularity and refined suction-based manipulation. These successors leverage Blue Jay’s data to create resilient hardware that is easier to maintain. By focusing on sensors that combine visual data with physical feedback, future iterations will likely achieve a higher success rate in picking irregular objects.
Final Assessment of the Blue Jay Project
The Blue Jay project functioned as a high-value prototype that bridged the gap between theoretical AI and physical execution. While the specific hardware was shelved, the software insights and manipulation techniques it pioneered remained foundational for next-generation systems. This initiative demonstrated that the value of industrial prototypes lay in the strategic data they provided for the long-term evolution of automation.