
The long-standing boundary between high-speed mechanical power and human safety has finally been breached by a generation of machines that no longer require steel cages to operate. For decades, the industrial floor was a binary environment: you either had the raw speed of a caged industrial arm or the cautious, often sluggish movement of a collaborative robot. The arrival of the Mantis MR-1 signals a definitive end to this compromise, proving that “Physical AI” can manage the complex variables of a shared workspace without sacrificing the throughput that modern manufacturing demands. This review examines how this transition from physical barriers to intelligent perception is restructuring the economics of automation.
The Evolution of Fenceless Industrial Automation
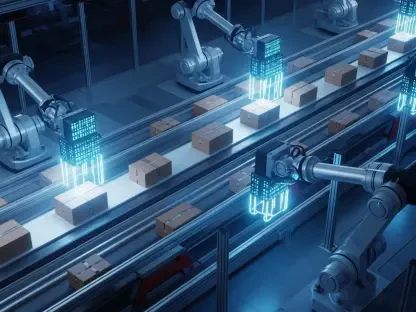
Historically, industrial automation relied on “dumb” safety—physical separation or simple light curtains that halted all motion the moment a perimeter was breached. This created massive dead zones on factory floors and hindered the flexibility required for modern, high-mix production. The shift toward fenceless systems represents a move toward active environmental awareness, where the robot is no longer a blind actor following a pre-programmed path. Instead, it utilizes high-fidelity spatial data to navigate its surroundings in real-time.
This evolution is not merely a hardware upgrade; it is a fundamental change in how machines exist within a human environment. By merging the structural rigidity and motor power of traditional industrial arms with the sensing capabilities previously reserved for autonomous vehicles, fenceless robotics allows for a hybrid workspace. In this new configuration, the robot occupies the same footprint as a human worker, reacting to presence not with a total shutdown, but with a nuanced, software-driven adjustment of its own kinetic energy.
Key Technical Components and Safety Architecture
Mantis SafetyCore and STAR Detection
The technical backbone of this breakthrough is the Mantis SafetyCore, a sophisticated control layer that processes inputs from “STAR” range-based detection sensors. Unlike standard collaborative robots that often rely on force-torque sensors to detect a collision after it has already occurred, the MR-1 focuses on pre-collision avoidance. With 47 embedded safety functions, the system creates a high-resolution “safety envelope” around the arm. This density of sensor data allows the machine to distinguish between a static obstacle, like a pallet, and a dynamic one, like a human hand.
The achievement of a Performance Level d (PL=d) rating is the most critical metric here. It signifies that the software-based safety protocols are statistically as reliable as a physical gate. This reliability stems from redundant processing; every movement is cross-checked against the sensor field thousands of times per second. This ensures that even if a single sensor fails, the architecture maintains a fail-safe state, preventing the high-velocity arm from ever becoming a projectile in a shared space.
Performance Metrics and Physical AI
When looking at the numbers, the MR-1 challenges the status quo by offering a 10 m/s maximum speed alongside a 5kg payload and 900mm reach. In typical “cobot” scenarios, speeds are capped significantly lower to prevent injury upon impact. However, the MR-1 uses Physical AI to modulate its velocity based on proximity. If the workspace is clear, it runs at full industrial speed; as a human approaches, it incrementally scales down. This dynamic scaling ensures that productivity does not drop to zero just because a technician walked by to check a nearby station.
Recent Innovations in Robotics Safety Certification
The recent certification by SGS Fimko Oy represents a watershed moment for the industry, as it marks the first time a high-speed arm has met ISO 10218 and ISO 13849 standards without guarding. This third-party validation moves fenceless technology out of the “experimental” phase and into the realm of mass-producible industrial equipment. By securing the CE mark, the technology has cleared the highest regulatory hurdles in the world, proving that algorithmic safety is now legally and technically equivalent to mechanical safety.
This shift in certification philosophy suggests that regulators are beginning to trust AI-driven functional safety. For the market, this means that companies can now deploy these systems with the same legal protections and insurance clearances as traditional robots. The innovation here is not just in the arm’s movement, but in the rigorous verification of the code that governs that movement, ensuring that “fenceless” does not mean “unprotected.”
Real-World Applications and Deployment
Flexible Logistics and Warehousing
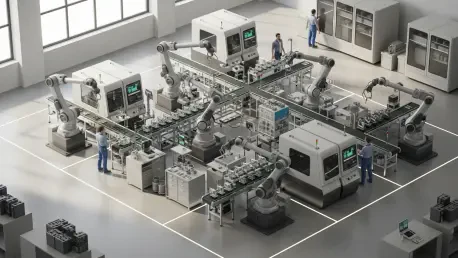
In the high-density environment of a modern warehouse, floor space is the most valuable commodity. Traditional robots, with their bulky safety cages, often take up three times their own functional footprint. Fenceless systems like the MR-1 eliminate this “safety tax,” allowing picking and palletizing cells to be integrated directly into existing manual lines. This allows facilities to automate specific high-strain tasks without having to redesign the entire workflow or move walls.
Code-Free Integration and Digital Twins
To solve the talent gap in robotics engineering, the integration of Mantis Studio provides a code-free interface. By utilizing a 3D digital twin, operators can simulate the robot’s interaction with the environment before the hardware even arrives. This simulation is vital because it predicts how the robot will react to human traffic patterns, allowing for the optimization of cycle times. The ability to model these “soft” safety interactions in a virtual space significantly lowers the risk and cost of deployment for smaller manufacturers.
Industry Challenges and Regulatory Hurdles
Despite the technical triumphs, the industry still faces a psychological barrier. Many safety officers remain skeptical of a high-speed arm moving without a cage, and shifting this culture requires consistent, incident-free performance over several years. Furthermore, the reliance on advanced sensors means these robots can be sensitive to environmental noise. Dust, steam, or strobe lighting in a factory could potentially trigger “phantom” safety stops, leading to unexpected downtime if the AI models are not sufficiently robust to filter out environmental interference.
Future Trajectory of Intelligent Robotics
The success of fenceless industrial arms provides the foundational safety framework for the humanoid robots and mobile manipulators currently in development. As automation moves from the predictable factory floor into “unstructured” environments like commercial kitchens or hospital corridors, the ability to operate safely at high speeds around untrained civilians will be the primary differentiator. We are moving toward a future where “safety” is an invisible, intelligent service provided by the machine’s operating system, rather than a physical constraint.
Assessment of the Current Technological State
The review of this sector highlighted a definitive shift in the industrial paradigm, where software-defined safety has finally matched the reliability of physical infrastructure. The certification of the Mantis MR-1 demonstrated that the trade-off between speed and safety was a temporary limitation rather than a permanent law of robotics. By integrating high-resolution sensing with redundant safety functions, the industry successfully removed the cages that once restricted the utility of high-speed automation. This milestone paved the way for more integrated, human-centric production environments, suggesting that the future of the global workforce will depend on the seamless, barrier-free cooperation between biological and mechanical intelligence. Manufacturers who adopted this technology early gained a significant advantage in floor-space efficiency and operational flexibility.